Sensors, Free Full-Text
Por um escritor misterioso
Last updated 10 maio 2024
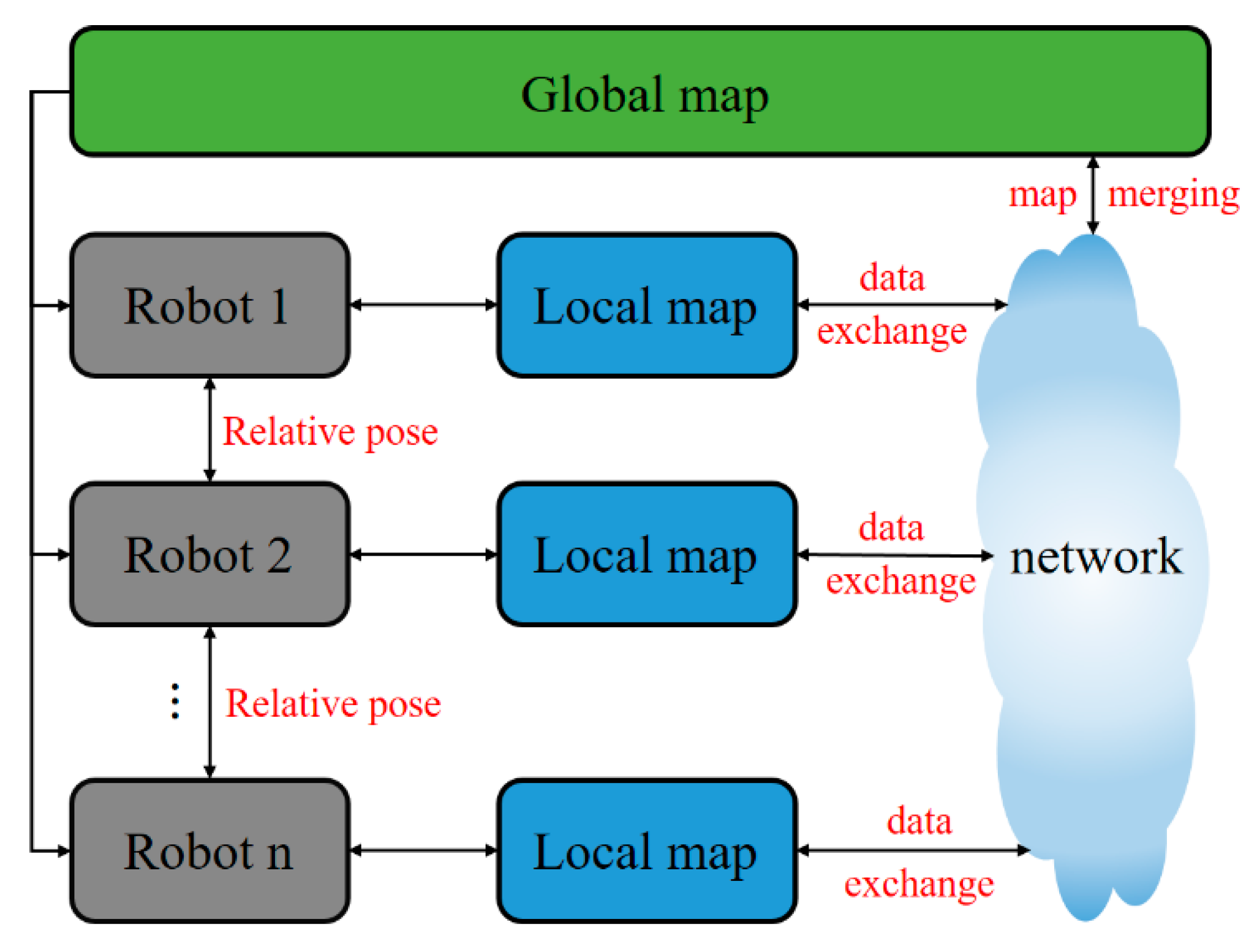
When multiple robots are involved in the process of simultaneous localization and mapping (SLAM), a global map should be constructed by merging the local maps built by individual robots, so as to provide a better representation of the environment. Hence, the map-merging methods play a crucial rule in multi-robot systems and determine the performance of multi-robot SLAM. This paper looks into the key problem of map merging for multiple-ground-robot SLAM and reviews the typical map-merging methods for several important types of maps in SLAM applications: occupancy grid maps, feature-based maps, and topological maps. These map-merging approaches are classified based on their working mechanism or the type of features they deal with. The concepts and characteristics of these map-merging methods are elaborated in this review. The contents summarized in this paper provide insights and guidance for future multiple-ground-robot SLAM solutions.

1PCS WFS3-40N415 6043920 Sick Label Sensor 100% New & Original
Sensors, Free Full-Text

BOSCH Professional GIS 1000 C Thermo Bluetooth Thermal Camera

soil moisture sensors –

Advanced Materials: Early View

ESPHome — ESPHome

BOSCH 0261230013 Original Equipment Manifold Absolute
Sensor Tower - Market-Leading Digital Intelligence

Air Intake Pressure Sensor MAP Sensor 079800-4250 37830-PAA-S00
Sensors, Free Full-Text
Recomendado para você
-
 Festival Curta Cinema 2020 by CURTACINEMA - Issuu10 maio 2024
Festival Curta Cinema 2020 by CURTACINEMA - Issuu10 maio 2024 -
 Festivais em 2023 — Ingresse10 maio 2024
Festivais em 2023 — Ingresse10 maio 2024 -
 Duda Ferrão Games10 maio 2024
Duda Ferrão Games10 maio 2024 -
 ROBLOX - MOSTRANDO MINHA CASA (BLOXBURG)10 maio 2024
ROBLOX - MOSTRANDO MINHA CASA (BLOXBURG)10 maio 2024 -
ferrão Nova Skin10 maio 2024
-
 MINECRAFT - CONSTRUÍNDO UMA PONTE DE DIORITO. MUITO10 maio 2024
MINECRAFT - CONSTRUÍNDO UMA PONTE DE DIORITO. MUITO10 maio 2024 -
canal da duda|Pesquisa do TikTok10 maio 2024
-
 Petición · We demand Mythic Games to respect Darkest Dungeon10 maio 2024
Petición · We demand Mythic Games to respect Darkest Dungeon10 maio 2024 -
 Petición · LET E3 RETURN IN ITS PHYSICAL AND DIGITAL FORMAT ITS10 maio 2024
Petición · LET E3 RETURN IN ITS PHYSICAL AND DIGITAL FORMAT ITS10 maio 2024 -
Dota 2 - Available now to all Battle Pass owners who reach level10 maio 2024


você pode gostar
-
 O que é o Game Pass Core que vai chegar ao Xbox10 maio 2024
O que é o Game Pass Core que vai chegar ao Xbox10 maio 2024 -
 log rolling down hill — probably the best google feud response i've got10 maio 2024
log rolling down hill — probably the best google feud response i've got10 maio 2024 -
 LYRICS AMV』GAKUSEN TOSHI ASTERISK S2 OP FULL「THE ASTERISK WAR - SHIENA NISHIZAWA」10 maio 2024
LYRICS AMV』GAKUSEN TOSHI ASTERISK S2 OP FULL「THE ASTERISK WAR - SHIENA NISHIZAWA」10 maio 2024 -
 Richard Christy on X: 20 Years Ago Today My Favorite TV Show EVER10 maio 2024
Richard Christy on X: 20 Years Ago Today My Favorite TV Show EVER10 maio 2024 -
 Perguntas Pesadas E Complicadas Para Bricnadeiras De10 maio 2024
Perguntas Pesadas E Complicadas Para Bricnadeiras De10 maio 2024 -
 One Piece Figure – Luffy Full Clothes One Piece Film Red Action Figure10 maio 2024
One Piece Figure – Luffy Full Clothes One Piece Film Red Action Figure10 maio 2024 -
 Livro: Aprenda a Jogar Xadrez Corretamente - A. Carneiro e J10 maio 2024
Livro: Aprenda a Jogar Xadrez Corretamente - A. Carneiro e J10 maio 2024 -
 My Puppet Cosplay 🖤 : r/fivenightsatfreddys10 maio 2024
My Puppet Cosplay 🖤 : r/fivenightsatfreddys10 maio 2024 -
![Axis & Allies: Europe 1940 (2nd Edition) [Board Game]](https://accidentallycoolgames.com/cdn/shop/products/AA_Europe_1940_gallery_1_800x.png?v=1590859295) Axis & Allies: Europe 1940 (2nd Edition) [Board Game]10 maio 2024
Axis & Allies: Europe 1940 (2nd Edition) [Board Game]10 maio 2024 -
 Jogos De Pintura Diamante Beleza E Besta Disney Filme Beleza E A Besta Personagens Diamante Mosaico Bordado Casa Decoração Presente - Pinturas Com Diamante E Ponto Em Cruz - AliExpress10 maio 2024
Jogos De Pintura Diamante Beleza E Besta Disney Filme Beleza E A Besta Personagens Diamante Mosaico Bordado Casa Decoração Presente - Pinturas Com Diamante E Ponto Em Cruz - AliExpress10 maio 2024